

-
Product
-
-
- Universal Type Digital Panel Meter
- Temperature And Electrical Calibrator
- Motor & Phase Rotation Indicator / Tachometer
- Portable Digital Oscilloscope
- Non-contact phase detection with built-in torch
- Moisture Meter
- Gas Leak Detection
- Electrical Digital Panel Meter
- Digital Thermometer
- Digital Multimeter
- Digital Clamp Meter
- Coating Thickness Gauge
- Chemical Meter
- Accessories For Temperature Measurement
- Insulation and Mega Ohm meter
- Lux Meter / Sound Level Meter
- Lamp&Neckdown Detector
- Non-contact measurement
- Dimeter measurement
- Vibration Meter











-




























"PID & Auto-Tuning"
"PID & Auto-Tuning"

เรียบเรียงโดย : พงศธร เหง่างาม
ฝ่ายขายสาขาขอนแก่น
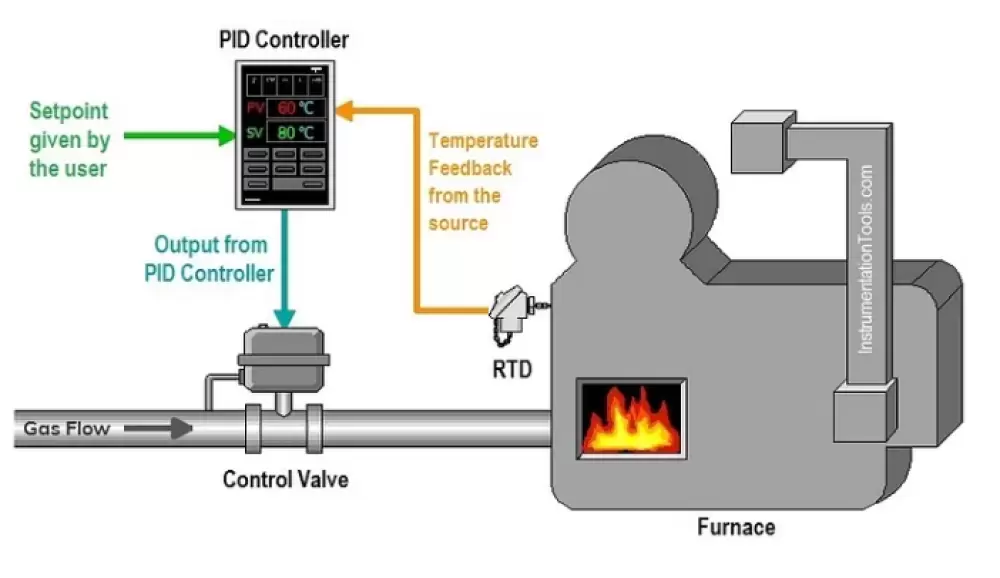
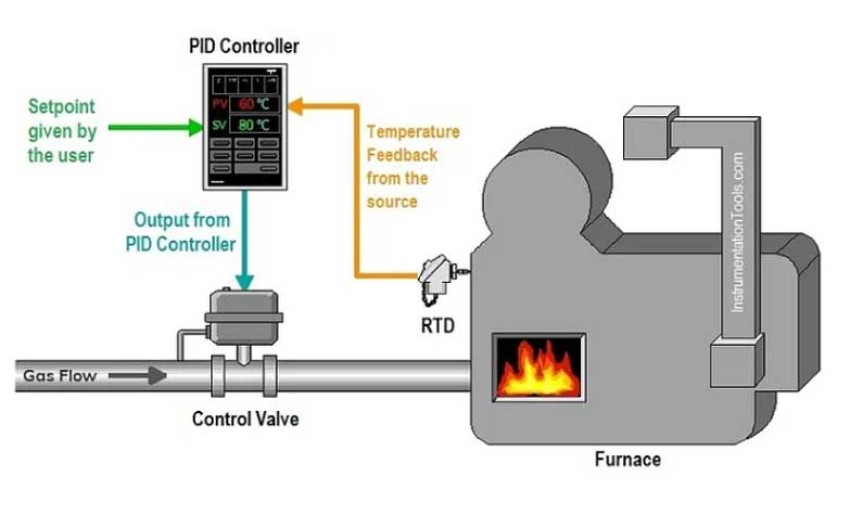
สวัสดีครับทุกท่าน PID Controllers ถูกนำมาใช้กันอย่างแพร่หลายในอุตสาหกรรมทุกวันนี้ แม้ว่าจะมีฟังก์ชั่นคอนโทรลเลอร์ PID inbuilt ใน PLC แต่ฟังก์ชั่นเหล่านี้ใช้ในหลายแอพพลิเคชั่น ประมาณ 95% ของกระบวนการแบบลูปในอุตสาหกรรมระบบอัตโนมัติใช้ตัวควบคุมประเภทนี้
PID ย่อมาจาก Proportional-Integral-Derivative ตัวควบคุมทั้งสามนี้รวมกันในลักษณะที่พวกเขาสามารถควบคุมกระบวนการตามค่าที่ผู้ใช้กำหนด
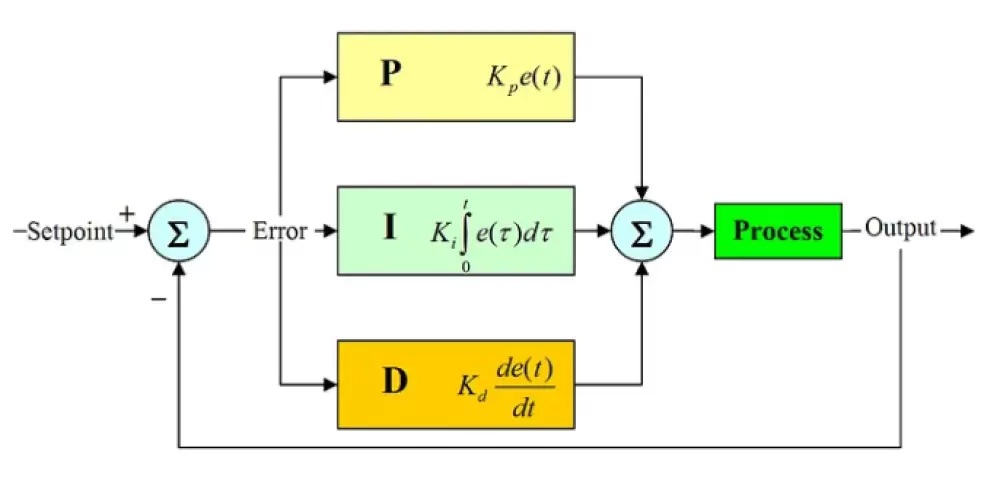
ผลของ P action
สามารถเพิ่มผลของ Paction ได้โดยลดค่า P ลง จะมีผลทำให้
- มีค่า Offset น้อยลง
- มี Overshoot สูงขึ้น เกิดการแกว่งมากขึ้น
- ระบบขาดเสถียรภาพมากขึ้น ถ้าลดค่า P มากเกินไป จะทำให้ระบบ Oscillate
ผลของ I action
สามารถเพิ่มผลของ 1 action ได้โดยลดค่า i ลงจะมีผลทำให้
- ไม่มี Offset
- มี Overshoot สูงขึ้น เกิดการแกว่งมากขึ้น
- ระบบขาดเสถียรภาพมากขึ้น ถ้าลดค่า i มากเกินไป จะทำให้ระบบOcillate หรือ Unstable ได้
ผลของ D action
สามารถเพิ่มผลของ D action ได้โดยเพิ่มค่า D ขึ้นจะมีผลทำให้
- มี Overshoot ลดลงมีคาบการแกว่งสั้นลง
- ระบบมีเสถียรภาพมากขึ้น ไวขึ้น
- ในระบบที่เร็วอยู่แล้วจะขาดเสถียรภาพ
AUTO - TUNING
เป็นฟังก์ชันที่มักมีอยู่ในเครื่องควบคุมชนิดดิจิตอล ใช้สำหรับคำนวณหาค่า PID ที่เหมาะสมกับโพรเซสโดย อัตโนมัติ เมื่อเริ่มการทำงาน Auto-Tuning เครื่องควบคุมจะทำงานเป็น ON-OFF ระยะหนึ่งทำให้ระบบเกิดการแกว่ง (Oscillate) เพื่อศึกษาคุณลักษณะของโพรเซสว่าช้าหรือเร็ว, มี Overshoot สูงเท่าใด เครื่องควบคุมจะควบคุมในลักษณะ ON-OFF อยู่ประมาณ 3-5 Cycle แล้วจึงทำการคำนวณหาค่า PID ออกมาและเริ่มควบคุมระบบด้วย PID Control
ยกตัวอย่างสินค้าที่มีทั้ง PID และ AUTO - TUNING
 SHIMAX ทุก Series ครับ
SHIMAX ทุก Series ครับ
ขอบคุณข้อมูลอ้างอิงจาก : Medium.com
Tip Recommend
Product Recommend



Subscribe
กรอกอีเมลเพื่อรับข่าวสาร โปรโมชั่น และกิจกรรมต่างๆ ของเราได้ที่นี่







