

-
ผลิตภัณฑ์ทั้งหมด
-
-
- Universal Type Digital Panel Meter
- มิเตอร์ใช้สำหรับสอบเทียบทางไฟฟ้า/อุณหภูมิ
- เครื่องตรวจสอบทิศทางการหมุนของมอเตอร์ / มิเตอร์วัดความเร็วรอบ
- ดิจิตอลออสซิโลสโคปแบบพกพา
- ปากกาเช็คไฟแบบไม่สัมผัส
- มิเตอร์วัดความชื้นวัตถุดิบ
- มิเตอร์วัดก๊าซรั่วไหล
- มิเตอร์ติดหน้าตู้แบบ Digital ทางด้านไฟฟ้า
- ดิจิตอลเทอร์โมมิเตอร์
- ดิจิตอลมัลติมิเตอร์
- ดิจิตอลแคลมป์มิเตอร์
- มิเตอร์วัดความหนาของสีเคลือบ
- มิเตอร์วัดค่าทางเคมี
- อุปกรณ์เสริมในการใช้งานวัดอุณหภูมิ
- มิเตอร์วัดความเป็นฉนวน และเมกะโอห์มมิเตอร์
- มิเตอร์วัดค่าความเข้มแสง / วัดระดับความดังของเสียง
- เครื่องตรวจเช็คความ เว้า-นูน ของสายไฟ
- เครื่องวัดระยะแบบไม่สัมผัส
- เครื่องวัดความกลมของสายไฟ
- มิเตอร์วัดความสั่นสะเทือน











-
- สวิตช์เวลารายปี
- เครื่องนับจำนวนแบบแอนาลอก
- นาฬิกาตั้งเวลาแบบแอนาลอก
- นาฬิกาตั้งเวลาแบบดิจิตอล
- สวิตช์เปิด-ปิดสั่งงานด้วยแสง
- เครื่องนับจำนวนแบบดิจิตอล
- เครื่องนับชั่วโมงการทำงานของเครื่องจักร
- เครื่องตั้งเวลาแบบดิจิตอล
- เครื่องตรวจจับความเคลื่อนไหว
- เซนเซอร์สวิตซ์บันได
- เครื่องนับรอบ
- Multifunction Counter
- เครื่องวัดคุณภาพอากาศ




-
























"PID & Auto-Tuning"
"PID & Auto-Tuning"

เรียบเรียงโดย : พงศธร เหง่างาม
ฝ่ายขายสาขาขอนแก่น
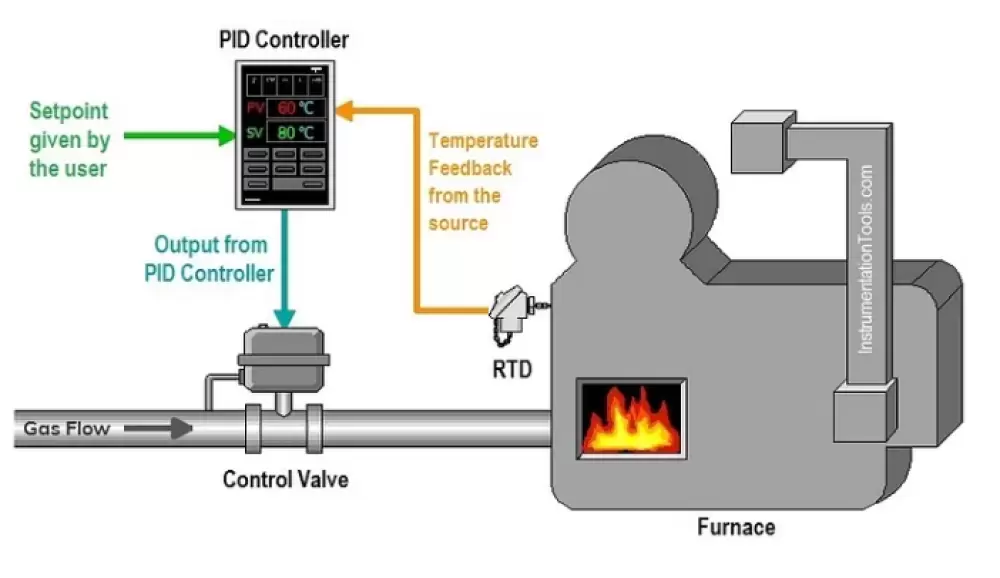
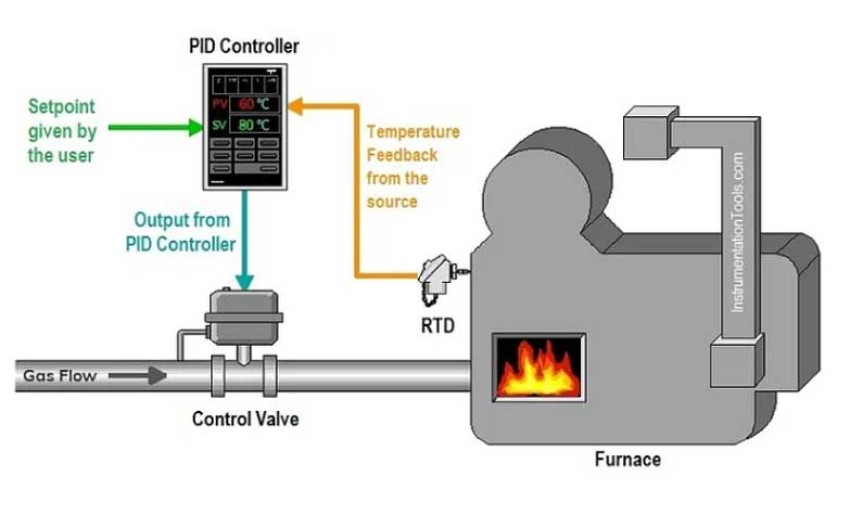
สวัสดีครับทุกท่าน PID Controllers ถูกนำมาใช้กันอย่างแพร่หลายในอุตสาหกรรมทุกวันนี้ แม้ว่าจะมีฟังก์ชั่นคอนโทรลเลอร์ PID inbuilt ใน PLC แต่ฟังก์ชั่นเหล่านี้ใช้ในหลายแอพพลิเคชั่น ประมาณ 95% ของกระบวนการแบบลูปในอุตสาหกรรมระบบอัตโนมัติใช้ตัวควบคุมประเภทนี้
PID ย่อมาจาก Proportional-Integral-Derivative ตัวควบคุมทั้งสามนี้รวมกันในลักษณะที่พวกเขาสามารถควบคุมกระบวนการตามค่าที่ผู้ใช้กำหนด
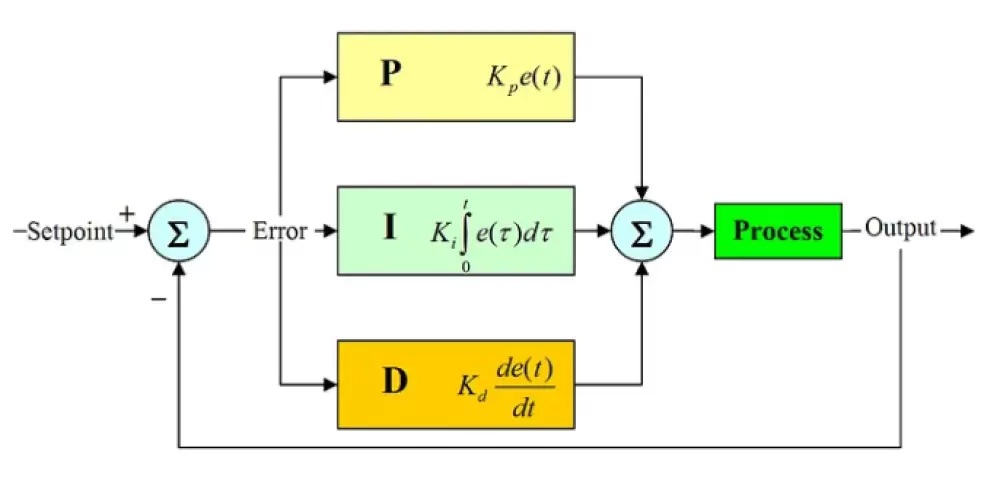
ผลของ P action
สามารถเพิ่มผลของ Paction ได้โดยลดค่า P ลง จะมีผลทำให้
- มีค่า Offset น้อยลง
- มี Overshoot สูงขึ้น เกิดการแกว่งมากขึ้น
- ระบบขาดเสถียรภาพมากขึ้น ถ้าลดค่า P มากเกินไป จะทำให้ระบบ Oscillate
ผลของ I action
สามารถเพิ่มผลของ 1 action ได้โดยลดค่า i ลงจะมีผลทำให้
- ไม่มี Offset
- มี Overshoot สูงขึ้น เกิดการแกว่งมากขึ้น
- ระบบขาดเสถียรภาพมากขึ้น ถ้าลดค่า i มากเกินไป จะทำให้ระบบOcillate หรือ Unstable ได้
ผลของ D action
สามารถเพิ่มผลของ D action ได้โดยเพิ่มค่า D ขึ้นจะมีผลทำให้
- มี Overshoot ลดลงมีคาบการแกว่งสั้นลง
- ระบบมีเสถียรภาพมากขึ้น ไวขึ้น
- ในระบบที่เร็วอยู่แล้วจะขาดเสถียรภาพ
AUTO - TUNING
เป็นฟังก์ชันที่มักมีอยู่ในเครื่องควบคุมชนิดดิจิตอล ใช้สำหรับคำนวณหาค่า PID ที่เหมาะสมกับโพรเซสโดย อัตโนมัติ เมื่อเริ่มการทำงาน Auto-Tuning เครื่องควบคุมจะทำงานเป็น ON-OFF ระยะหนึ่งทำให้ระบบเกิดการแกว่ง (Oscillate) เพื่อศึกษาคุณลักษณะของโพรเซสว่าช้าหรือเร็ว, มี Overshoot สูงเท่าใด เครื่องควบคุมจะควบคุมในลักษณะ ON-OFF อยู่ประมาณ 3-5 Cycle แล้วจึงทำการคำนวณหาค่า PID ออกมาและเริ่มควบคุมระบบด้วย PID Control
ยกตัวอย่างสินค้าที่มีทั้ง PID และ AUTO - TUNING
 SHIMAX ทุก Series ครับ
SHIMAX ทุก Series ครับ
ขอบคุณข้อมูลอ้างอิงจาก : Medium.com
Tip แนะนำ
สินค้าแนะนำ



ลงทะเบียนรับข่าวสาร
กรอกอีเมลเพื่อรับข่าวสาร โปรโมชั่น และกิจกรรมต่างๆ ของเราได้ที่นี่







