

-
ผลิตภัณฑ์ทั้งหมด
-
-
- Universal Type Digital Panel Meter
- มิเตอร์ใช้สำหรับสอบเทียบทางไฟฟ้า/อุณหภูมิ
- เครื่องตรวจสอบทิศทางการหมุนของมอเตอร์ / มิเตอร์วัดความเร็วรอบ
- ดิจิตอลออสซิโลสโคปแบบพกพา
- ปากกาเช็คไฟแบบไม่สัมผัส
- มิเตอร์วัดความชื้นวัตถุดิบ
- มิเตอร์วัดก๊าซรั่วไหล
- มิเตอร์ติดหน้าตู้แบบ Digital ทางด้านไฟฟ้า
- ดิจิตอลเทอร์โมมิเตอร์
- ดิจิตอลมัลติมิเตอร์
- ดิจิตอลแคลมป์มิเตอร์
- มิเตอร์วัดความหนาของสีเคลือบ
- มิเตอร์วัดค่าทางเคมี
- อุปกรณ์เสริมในการใช้งานวัดอุณหภูมิ
- มิเตอร์วัดความเป็นฉนวน และเมกะโอห์มมิเตอร์
- มิเตอร์วัดค่าความเข้มแสง / วัดระดับความดังของเสียง
- เครื่องตรวจเช็คความ เว้า-นูน ของสายไฟ
- เครื่องวัดระยะแบบไม่สัมผัส
- เครื่องวัดความกลมของสายไฟ
- มิเตอร์วัดความสั่นสะเทือน











-
- สวิตช์เวลารายปี
- เครื่องนับจำนวนแบบแอนาลอก
- นาฬิกาตั้งเวลาแบบแอนาลอก
- นาฬิกาตั้งเวลาแบบดิจิตอล
- สวิตช์เปิด-ปิดสั่งงานด้วยแสง
- เครื่องนับจำนวนแบบดิจิตอล
- เครื่องนับชั่วโมงการทำงานของเครื่องจักร
- เครื่องตั้งเวลาแบบดิจิตอล
- เครื่องตรวจจับความเคลื่อนไหว
- เซนเซอร์สวิตซ์บันได
- เครื่องนับรอบ
- Multifunction Counter
- เครื่องวัดคุณภาพอากาศ




-
























การควบคุมแบบ Proportional + Integral + Derivative (PID)
การควบคุมแบบ Proportional + Integral + Derivative (PID)

เขียนโดย : อดิศร แซ่ฉั่ว
ฝ่ายขายสำนักงานใหญ่
สวัสดีครับทุกท่าน การควบคุมแบบ Proportional + Integral + Derivative (PID) เป็นการควบคุมแบบ Proportional, แบบ Integral และแบบ Derivative เข้าด้วยกันสามารถแสดงในรูปแบบของสมการได้ดังนี้

จุดมุ่งหมายของการควบคุม คือ พยายามรักษาค่า PV ให้เท่ากับ SV ตลอดเวลาเมื่อเกิดการเปลี่ยนแปลงขึ้นในระบบ เช่น Load เปลี่ยน หรือ มีการเปลี่ยนค่า Setpoint ค่า PV จะไม่เท่ากับค่า SP (เกิดErrorขึ้น)อยู่ขณะหนึ่งแล้วเครื่องควบคุมต้องสามารถควบคุมให้ค่าPVเข้าสู่Setpointให้ได้ โดยการนำค่าPVไปสู่ค่า SP จะแตกต่างกันตามลักษณะของค่า PID ที่ตั้งไว้ ระบบใดๆ อาจรักษาค่า PV ไว้ที่Setpointได้เหมือนกันแต่ผลตอบสนองของระบบหนึ่งอาจจะเร็วกว่าและมี Over-Shootน้อยกว่า นั่นแสดงถึงระบบนี้มีการควบคุมที่ดีกว่า ซึ่งจะเห็นถึงจุดประสงค์หลักของการควบคุมคือ เสถียรภาพหรือการรักษาค่า PV ไว้ที่ Setpoint ให้ได้ก็ตาม แต่ในความเป็นจริงการควบคุมที่ดีต้องมองถึงความเร็วในการตอบสนองด้วย เพื่อให้ได้ผลตอบสนองให้ดีที่สุด สามารถสรุปลักษณะควบคุมที่ดีได้ดังนี้
1.ระบบมีเสถียนภาพ (Stable) สามารถรักษาค่า PV ไว้ที่ Setpoint ได้
2.ระบบมีการตอบสนองเร็ว
3.ระบบไม่แกว่ง มีค่า Overshoot ต่ำ
4.ไม่เกิด Offset ที่สภาวะสุดท้าย
5.ระบบสามารถรองรับการเกิดการรบกวนหรือการเปลี่ยนค่า Setpoint ได้
การปรับค่า PID ที่โพรเซสหนึ่งแล้วมีผลตอบสนองที่ดี เมื่อนำค่า PID นี้ไปใช้กับอีกโพรเซสหนึ่ง อาจจะให้ผลตอบสนองที่ไม่ดีก็ได้ ซึ่งผลลของการปรับค่าPIDมีดังนี้
ผลของ P action
สามารถเพิ่มผลของ P action ได้โดยลดค่า PB ลง จะมีผลทำให้ มีค่าOffsetน้องลง,มีOvershootสูงขึ้นเกิดการแกว่งมากขึ้น,ระบบขาดเสถียรภาพมากขึ้นและถ้าลดค่าPBมากเกินไปจะทำให้ระบบ Oscillate
ผลของ I action
สามารถเพิ่มผลของ I action ได้โดยการลดค่า T ลงจะมีผลทำให้ ไม่มี Offset , มี Overshoot สูงขึ้น เกิดการแกว่งมากขึ้น,ระบบขาดเสถียรภาพมากขึ้นถ้าลดค่า T มากเกินไปจะทำให้ระบบ Ocillate หรือ Unstable ได้
ผลของ D action
สามารถเพิ่มผลของ D action ได้โดยเพิ่ม Td ขึ้นจะมีผลทำให้ มี Overshoot ลดลงมีคาบการแกว่งสั้นลง , ระบบมีเสถียรภาพมากขึ้น ไวขึ้น , แต่ในระบบที่เร็วอยู่แล้วจะขาดเสถียรภาพได้
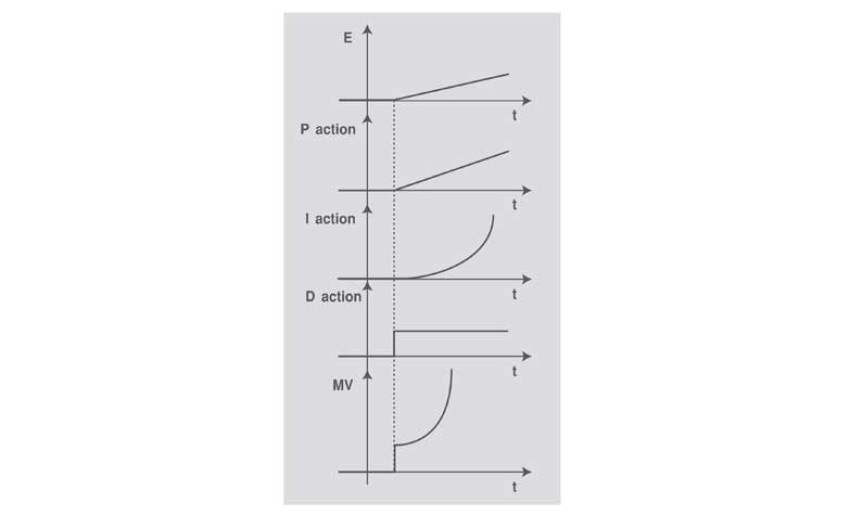
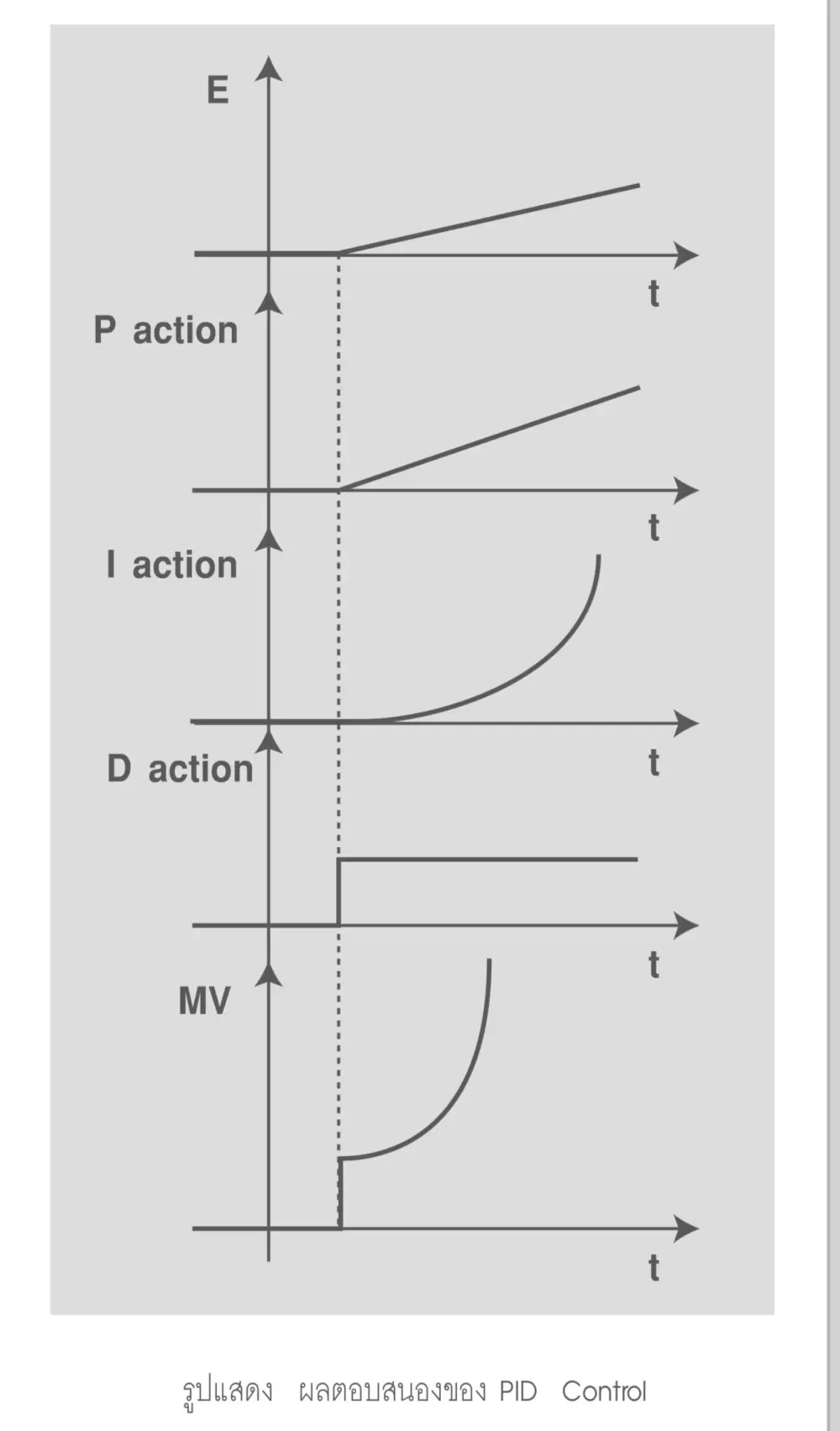
ลักษณะการทำงานของ PID CONTROL สามารถแสดงได้ดังรูป
สุดท้ายนี้การปรับค่า PID แบบ Manual อาจจะต้องดูระบบการควบคุมนั้นๆเป็นหลักและอาศัยประสบการณ์ในการทำงานที่ผ่านมาในการใส่ค่า PID แบบ Manual ลงไปให้ค่าการควบคุมที่ได้มีเสถียรภาพดีที่สุดครับ
Tip แนะนำ
สินค้าแนะนำ



 &picture=https://www.tic.co.th/storages/articles/featured-images/featured_image_2162_4163.jpg){kind=link}
ลงทะเบียนรับข่าวสาร
กรอกอีเมลเพื่อรับข่าวสาร โปรโมชั่น และกิจกรรมต่างๆ ของเราได้ที่นี่







